Utiliser les raccourcis vi dans la ligne de commande Sage
21 novembre 2011 | Catégories: terminal, sage, vim | View CommentsPar défaut, le terminal utilise les raccourcis emacs. Par exemple, CTRL-A pour aller au début de la ligne et CTRL-E pour aller à la fin de la ligne. Pour utiliser plutôt les raccourcis vi, il suffit de taper la commande suivante dans le terminal:
set -o vi
Par contre, ceci ne change pas le mode utilisé par la ligne de commande du logiciel Sage. Pour y parvenir, il faut plutôt ajouter les lignes suivantes dans le fichier ~/.inputrc:
set editing-mode vi set keymap vi-insert
Autre que l'option vi-insert, on peut également écrire vi ou vi-command pour la ligne set keyamp, mais je n'ai pas encore vu réellement une différence, car il semble toujours que le mode insertion est utilisé par défaut. On peut trouver plus d'informations sur le sujet ici:
http://vim.wikia.com/wiki/Use_vi_shortcuts_in_terminal
Recherche dans l'historique selon le préfixe
Tant qu'à y être, on peut en profiter pour activer une fonctionalité pour le terminal plutôt pratique qui est activée par défaut en Sage. Dans la ligne de commande Sage, en utilisant les flèches HAUT et BAS, on peut faire une recherche dans l'historique parmi les commandes ayant un préfixe commun avec le préfixe à gauche de la position du curseur. Pour activer cette fonctionalité dans le terminal, il suffit d'ajouter les deux lignes suivantes au même fichier ~/.inputrc:
"\e[A": history-search-backward # up-arrow "\e[B": history-search-forward # down-arrow
Merci à Franco Saliola de m'avoir partagé ces solutions.
Résoudre le puzzle Quantumino avec le logiciel Sage
14 novembre 2011 | Catégories: sage | View CommentsLe 29 octobre dernier, la version 4.7.2 de Sage est sortie. C'est dans cette version de Sage (merci beaucoup à Rob Beezer qui a arbitré cette contribution) qu'a été ajouté le code que j'ai écrit en juin dernier pour résoudre le puzzle appelé Quantumino. Ce puzzle avait été laissé à la salle à manger du Laboratoire de Combinatoire Informatique Mathematique de Montréal par Franco Saliola durant l'hiver 2011...

- Puzzle Quantumino par Family Games America
- Quantumino sur Youtube
La solution utilise le code des liens dansants qui se trouvait déjà dans Sage pour résoudre le problème du Sudoku. Les liens dansants ont été introduits par Donald Knuth en 2000 pour résoudre le pavage d'une région 2D par des pentaminos. Ici nous utilisons la même méthode en dimension quelconque et nous l'appliquons pour résoudre le puzzle Quantumino. Voici les deux pages concernées de la documentation de Sage:
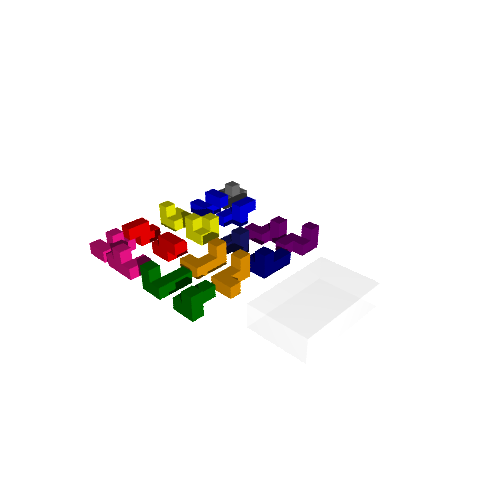
Voici les 17 blocs de bois du puzzle Quantumino:
sage: from sage.games.quantumino import show_pentaminos sage: show_pentaminos()
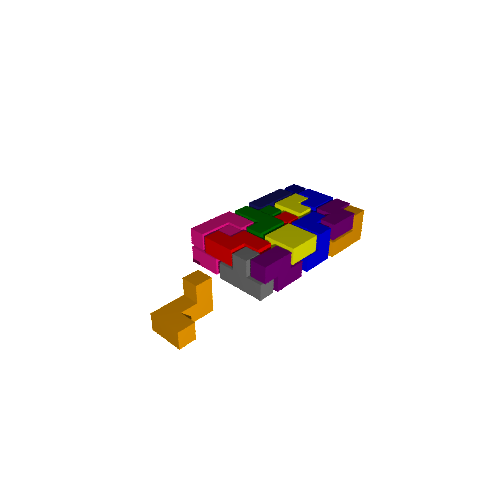
Pour résoudre le puzzle où le pentamino numéroté 7 est mis de côté:
sage: from sage.games.quantumino import QuantuminoSolver sage: s = QuantuminoSolver(7).solve().next() sage: s.show3d().show(frame=False)
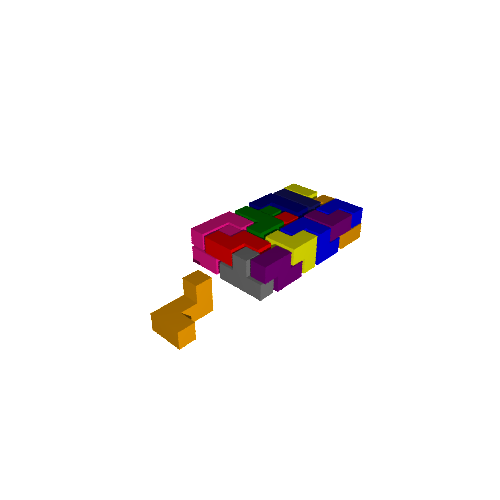
Pour obtenir d'autres solutions, utilisez l'itérateur retourné par la fonction solve. Notez que trouver la première solution est plus long car on a besoin de créer les données complètes pour décrire le problème:
sage: it = QuantuminoSolver(7).solve() sage: 1st_solution = it.next() sage: 2nd_solution = it.next() sage: 3rd_solution = it.next() sage: 3rd_solution.show3d().show(frame=False)
Pour obtenir la solution à l'intérieur d'autres boîtes:
sage: s = QuantuminoSolver(7, box=(4,4,5)).solve().next() sage: s.show3d()

S'il n'y a pas de solution, l'itération se termine immédiatement:
sage: QuantuminoSolver(7, box=(3,3,3)).solve().next() Traceback (most recent call last): ... StopIteration
Si vous êtes patients, vous pouvez essayer de calculer le nombre de solutions. Attention, il y en a beaucoup!:
sage: from sage.games.quantumino import QuantuminoSolver sage: q = QuantuminoSolver(7) sage: q.number_of_solutions() # prendra plusieurs jours de calculs
Le code permet aussi l'introspection. À partir d'un objet de la classe sage.combinat.tiling.TilingSolver, il est possible de récupérer les lignes de la matrice décrivant le problème de couverture exacte en question. Il est également possible d'obtenir une instance du solveur DLX et de tester certaines choses:
sage: q = QuantuminoSolver(0) sage: T = q.tiling_solver() sage: T Tiling solver of 16 pieces into the box (5, 8, 2) Rotation allowed: True Reflection allowed: False Reusing pieces allowed: False sage: rows = T.rows() sage: len(rows) 5484 sage: x = T.dlx_solver() sage: x <sage.combinat.matrices.dancing_links.dancing_linksWrapper object at ...>
Utiliser Sage dans une page web
14 octobre 2011 | Mise à jour: 07 mai 2012 | Catégories: web, sage | View CommentsLorsque j'ai participé aux Sage Days 31 à Seattle en juin dernier (conférence dont l'objectif était de développer le Sage Notebook), j'ai rencontré Jason Grout (Drake University, Iowa). Le projet de Jason était de parvenir à utiliser Sage directement dans une page web (voir la discussion public single cell sur sage-devel pour en savoir plus).
Son projet est toujours en cours, mais il semble déjà être fonctionnel à en juger la page web de Rob Beezer (University of Puget Sound, Washington) qui illustre un exemple en faisant des calculs sur le graphe de Petersen et le calcul d'un factoriel.
Essayons d'immiter ce qu'il a fait! Dans la cellule qui suit, on définit une fonction de deux variables \(f(x,y) = \frac{xy}{e^{x^2 + y^2}}\) et on affiche ses lignes de niveau. Cliquez sur le bouton Calculer pour les afficher. Vous pouvez aussi changer la fonction et réévaluer la cellule.
Les graphes 3D fonctionnent aussi. Par exemple, ajoutez la ligne suivante dans la cellule et cliquez sur Calculer:
plot3d(f, (x,-4,4), (y,-4,4))
Vous obtiendrez le graphe 3D de la surface \(z = f(x,y)\).
Comment faire ?
Pour rendre ceci possible, il faut d'abord faire appel au serveur Single Cell logé à l'adresse http://aleph.sagemath.org. Cela se fait avec le code suivant:
<!-- Sage Free Trial -->
<script type="text/javascript" src="http://aleph.sagemath.org/static/jquery.min.js"></script>
<script type="text/javascript" src="http://aleph.sagemath.org/embedded_sagecell.js"></script>
<script>
$(function() {
var makecells = function() {
singlecell.makeSagecell({
inputLocation: '#first_cell',
editor: 'codemirror',
replaceOutput: true,
hide: ['editorToggle', 'sageMode', 'computationID', 'messages', 'sessionTitle', 'done', 'sessionFilesTitle', 'sessionFiles', 'files', 'sageMode'],
evalButtonText: 'Calculer'
});
}
sagecell.init(makecells);
})
</script>
Et un peu plus bas dans la même page web, on écrit le code suivant, ce qui crée la cellule ci-haut:
<!-- First cell --> <div id="first_cell"><script type="text/code">f(x,y) = x * y / exp(x^2 + y^2) G = implicit_plot(f(x,y) , (x,-3,3), (y,-3,3), contours=30, cmap='hsv') G.show(aspect_ratio=1) </script></div>
Trouver les composantes de Sage utilisées par un calcul
05 octobre 2011 | Catégories: sage | View CommentsIl existe une méthode peu connue pour connaître les composantes de Sage utilisées par un calcul. Supposons qu'on a le calcul suivant:
sage: g = Permutation('(2,3)')
sage: h = Permutation('(2,3,4,5)')
sage: S = PermutationGroup([g, h])
sage: c = S.conjugacy_classes_subgroups()
Pour connaître les systèmes utilisés par le calcul précédent, on écrit:
sage: import sage.misc.citation
sage: sage.misc.citation.get_systems('S.conjugacy_classes_subgroups()')
['GAP']
Cela permet de savoir par exemple quels systèmes on doit citer dans un article de recherche qui les utilise. Voici un autre exemple qui montre que quatre systèmes sont utilisés pour calculer l'intégrale \(\int \cos(x^2) dx\):
sage: from sage.misc.citation import get_systems
sage: get_systems("integrate(cos(x^2), x)")
['MPFI', 'ginac', 'GMP', 'Maxima']
L'existence de la fonction get_systems a été rappelée en juillet 2011 par Mike Hansen dans cette conversation sur sage-devel : Citing used Sage components automatically.
Find the coordinates of the camera in Jmol
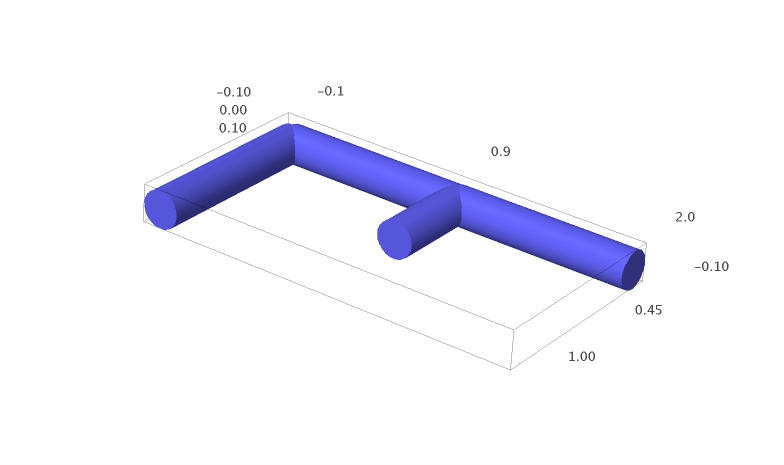
08 septembre 2011 | Catégories: jmol, sage | View CommentsIn Sage, we can create 3d graphic objects like the following:
sage: a = line3d([(0,1,0), (0,0,0), (1,0,0), (2,0,0)], radius=0.1) sage: b = line3d([(1,0,0), (1,0.5,0)], radius=0.1) sage: g = a + b sage: x,y = map(vector, g.bounding_box()) sage: g.frame_aspect_ratio(tuple(y-x)) # this sets the aspect ratio to 1 sage: g
Rotate the graphic object until you get a view you like.
One can save an image as a jpg, but the quality is not always good and one could prefer to draw the image using another tool like tikz code. But how to draw the 3d graphic object with the same projection?
To get information about the actual view and hopefully about the camera position, right clic on the image and go to the current state ("État courant" in French).
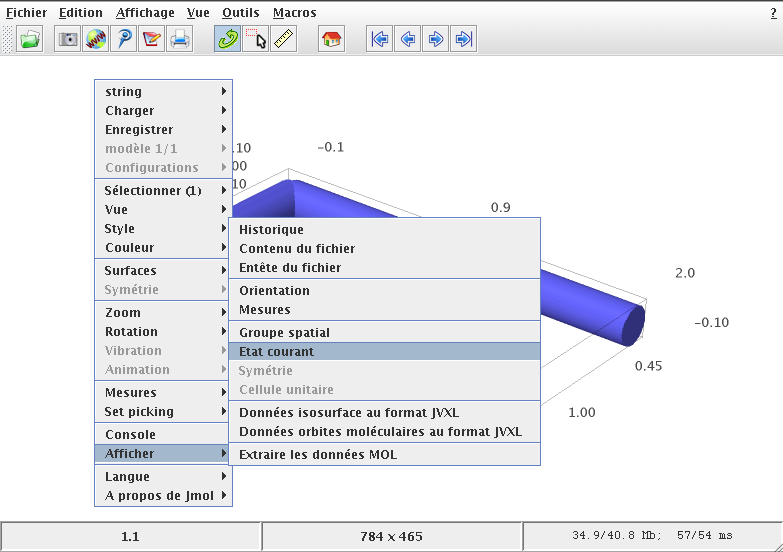
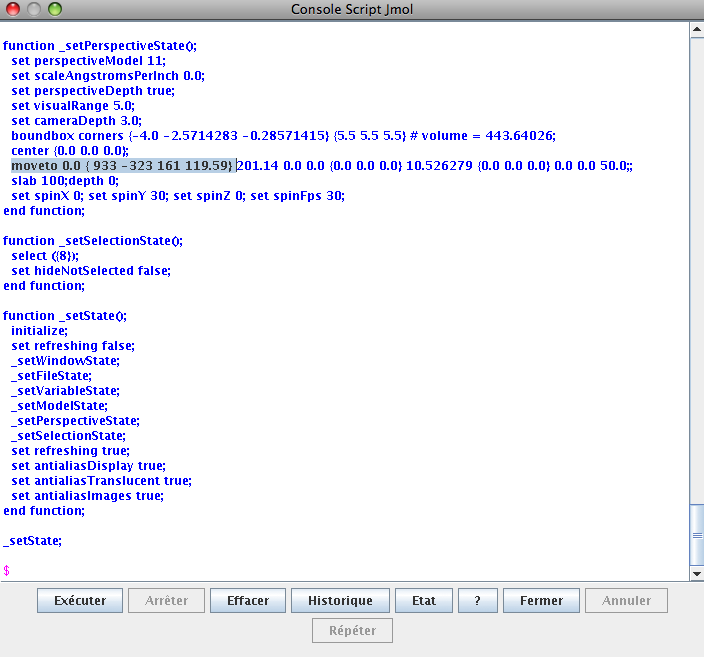
In the window that pops up, the information you need is the line starting with:
moveto 0.0 {933 -323 161 119.59}
According to the Jmol documentation of the moveto method (and also after doing some moveto tests in the script window), I understand that this tells that a rotation of angle \(119.59\) degrees is done on the axis \((933, -323, 161)\). The rotation is done counterclockwise (right-hand rule). From this information, we may then compute the rotation matrix using rotate_arbitrary method written by Robert Bradshaw and available in Sage. Note that the rotation of the method rotate_arbitrary is done counterclockwise (left-hand rule).
sage: from sage.plot.plot3d.transform import rotate_arbitrary sage: v = (933, -323, 161) sage: angle = 119.59 # righ-hand rule sage: angle = - angle # left-hand rule sage: angle_rad = angle * pi / 180 sage: M = rotate_arbitrary(v, angle_rad) sage: M [ 0.805577517225 -0.589785522899 -0.0565499842683] [ -0.30988380511 -0.338059560724 -0.888643776062] [ 0.504991971294 0.733395371121 -0.455098163637]
Since the default position of the camera is on the positive Z axis, one can find the actual position of the camera by doing the inverse of the rotation on the vector \((0,0,1)\):
sage: camera = ~M * vector((0,0,1)) sage: camera (0.504991971294, 0.733395371121, -0.455098163637)
To draw the same plot with the same angle of view in tikz, one needs the proper projection matrix:
sage: projection = M[:2] sage: projection [ 0.805577517225 -0.589785522899 -0.0565499842683] [ -0.30988380511 -0.338059560724 -0.888643776062]
One may test that this projection is really parallel to the segment that joins the origin to the camera:
sage: projection * camera (5.55111512313e-17, 0.0)
The part of tikz code that gives the projection information is:
sage: s = '['
sage: s += 'x={(%scm, %scm)},\n' % tuple(projection * vector((1,0,0)))
sage: s += 'y={(%scm, %scm)},\n' % tuple(projection * vector((0,1,0)))
sage: s += 'z={(%scm, %scm)}' % tuple(projection * vector((0,0,1)))
sage: s += ']'
sage: print s
[x={(0.805577517225cm, -0.30988380511cm)},
y={(-0.589785522899cm, -0.338059560724cm)},
z={(-0.0565499842683cm, -0.888643776062cm)}]
The complete tikz code is:
\begin{tikzpicture}
[x={(0.805577517225cm, -0.30988380511cm)},
y={(-0.589785522899cm, -0.338059560724cm)},
z={(-0.0565499842683cm, -0.888643776062cm)}, scale=3]
\draw[blue,line width=.4cm] (0,1,0) -- (0,0,0) -- (1,0,0) -- (2,0,0);
\draw[blue,line width=.4cm] (1,0,0) -- (1,0.5,0);
\end{tikzpicture}
The generated tikz image (pdf converted to a png: sorry for the bad quality) is:

One can verified that it has the same view as the original Jmol view.
Thanks to my brother Jean-Philippe who tested this method.
« Previous Page -- Next Page »
Propulsé par Blogofile
S'abonner au Flux RSS
et aux Commentaires.

This work by Sébastien Labbé is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.